[DIARY] 期待通りの動作を確認し基礎実験は完了
![]()
おはようございます。昨日はあまり良い天気にはならず、全体的に曇りがちな天気になりました。今週から前線が近づきいよいよ梅雨本番のような予報ですね。今週は雨の日が多い予報になっています。とりあえず本日はこれからWカップの日本戦を観戦しよう。
SSNが50を切り、コンディションの低下が予測される中で何時ものように昨日は6mをワッチしていました。午前中はEsの発生で国内と大陸局が沢山でておりました。午後になり、オープンを期待しながらワッチしていますが、あまり良くはないようです。
ワッチばかりしていてもしょうがないので、一昨日にLCDの表示とADCの動作確認までを完了したシャントフィードのバリコン調整コントローラの続きの実験を行いました。
続きはサーボモータを動かし、多回転ボリュームの動きに合わせてサーボモータが動作するかです。
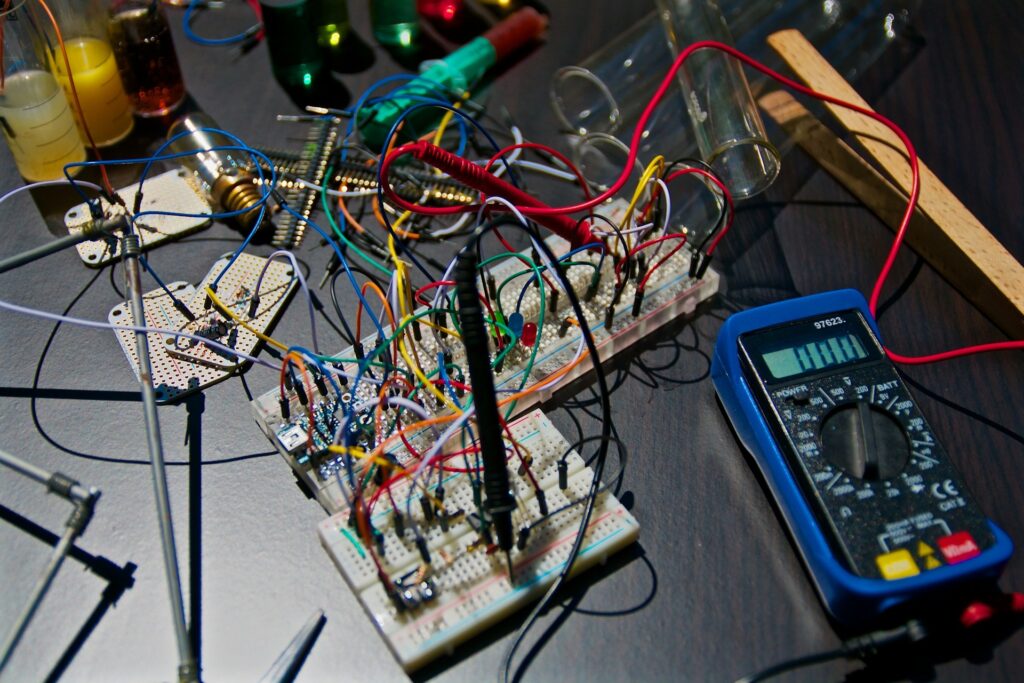
まずサーボモータが少々トルクの大きめのモノで有るため、同味に電流増により電圧降下が発生して動作不安定にならないように、別電源から共有する方法に回路図上ではなっているので、ブレッドボードを追加しサーボモータのレベル変換部を移して配線を行いました。
まずは、簡単なコードを用いて作ったHWでサーボモータがちゃんと動くかの確認を実施。簡単なコードで、0度→+90度→0度→-90度→0度と繰り返すループを作り、その通りにサーボモータが動くかを確認します。
サンプルコードはこんな感じの簡単なモノで動作確認をしました
import machine
import utime
from machine import Pin
# ==========================================
# サーボモーターのピン設定
# ==========================================
SERVO_PIN = 14
servo = machine.PWM(Pin(SERVO_PIN))
servo.freq(50) # 一般的なRCサーボは50Hz (周期20ms)
def set_servo_angle(angle):
"""
-90度 〜 +90度 の角度をパルス幅に変換してサーボを駆動する関数
"""
# 角度を0〜180度にシフト
target_degree = angle + 90
# 50Hzにおいて、一般的なサーボの動作パルス幅は 0.5ms 〜 2.5ms です。
# 16bit duty (0-65535) に換算:
# 0.5ms ( -90度) ≒ duty 1638
# 1.5ms ( 0度) ≒ duty 4915
# 2.5ms ( +90度) ≒ duty 8192
duty = int(1638 + (target_degree / 180.0) * (8192 - 1638))
# PWM出力
servo.duty_u16(duty)
# ==========================================
# メインテストループ
# ==========================================
print("サーボモーターの単体テストを開始します(Ctrl+Cで停止)")
print("ピン配置: GPIO14 を使用しています。")
while True:
print("角度: -90度 に移動します")
set_servo_angle(-90)
utime.sleep(2.0)
print("角度: 0度 に移動します")
set_servo_angle(0)
utime.sleep(2.0)
print("角度: +90度 に移動します")
set_servo_angle(90)
utime.sleep(2.0)
print("角度: 0度 に移動します")
set_servo_angle(0)
utime.sleep(2.0)
特に問題なく動作をしましたので、HWの設計も間違っておらずレベル変換も正しく動いているようです。
サーボモータの動作確認が出来ましたので、次は前回までに作ったコードをベースに、多回転ボリュームの値をADCで読み取り1度単位でサーボモータを動かしていくと言うコードに改版です。
既に多回転ボリュームの値をADCで分解し表示的にも1度刻みで変化させられるようになっていますので、その値を基準にPWMのパルス幅を変化させていくだけです。
一昨日の表示部の評価と、サーボモータの動作確認ができていたので改版したコードも何も無く無事動作することができました。
実際の動作動画がこれです。
プラス側にもマイナス側にも無事動作させることができましたので、これでブレッドボードによるバラックの確認実験は完了になります。
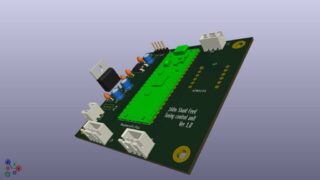
次の段階は、回路図からパターンを作りPWBを発注~入手することですね。PWBが入手できたら、実際に部品を組み込んで最終キバンでの評価を実施することになりますね。
そこで問題無ければケーシングをして完了。最後にシャントフィードのマッチング部の海瀬王になりますが、これは未だ未だ先の話になりそうです。
さて、実験も上手くいったので、まずはWカップの日本戦を観戦し、終わったらパターン設計を行いますかね。
コンディションが悪くなっても、やる事があるので楽しいですね。
![]() にほんブログ村 ↑ブログランキング参加中。クリックでランキングが上がりますので、ご支援をお願いします。
にほんブログ村 ↑ブログランキング参加中。クリックでランキングが上がりますので、ご支援をお願いします。

digital-dxer.comからのお知らせ
アマチュア無線をやってて困ったことないですか?
何か作りたいが工具が無い、アンテナ作りたいけど材料が無い
そんな時、工具から小さな小物材料、はたまた無線機からアンテナまで何でも簡単購入ができるYahoo!ショッピングが便利です。
クリックすれば後は到着を待つだけ、近くて簡単便利なYahoo!ショッピング。